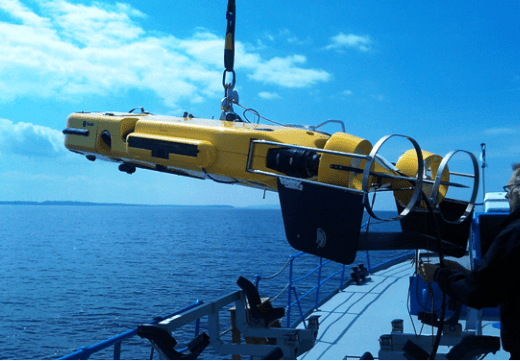
Hydroid joins Huntington Ingalls Industries
Hydroid joins Huntington Ingalls Industries Support for the Future of Robotic and Autonomous Systems for the ADF Huntington Ingalls Industries (HII) announced 4 February 2020 that it has entered into an agreement to acquire Hydroid Inc., a leading provider of advanced marine robotics, including the range of REMUS Unmanned Underwater Vehicles (UUVs) to 21 global […]